在台灣常見的地理位置表示方式
前言
最近開始接觸到跟 GPS 有關的東西,想說順便把地理定位相關的資料整理起來。所以這一篇就這樣誕生啦。
主要內容
地表上任何一個地理位置都可以用大地基準 ( Datum ) + 座標格式 ( Format ) 來表示。
在台灣我們常聽到的 TWD67、TWD97、WGS84 就是大地基準。而大地座標、六度分帶(UTM)、二度分帶(TM2) 就是座標格式。
大地基準
- TWD67 平面基準為1967年之參考橢球體(GRS67),以南投埔里之虎子山為大地基準。 橢球參數:長軸 a = 6378160m,扁率 $f = 298.25$
- TWD97 平面基準為1980年之參考橢球體(GRS80),以八個衛星追蹤站為基準。 橢球參數:長軸 a = 6378137m,扁率 $f = 298.257222101$
- WGS84 世界大地測量系統(英語:World Geodetic System, WGS),1984年的版本,也稱為 EPSG:4326。透過遍布世界的衛星觀測站觀測到的坐標建立,其精度為1~ 2m。 地球的質量中心為中心點,加上世界各地的1500個地理座標參考點。 橢球參數:長軸 a = 6378137m,扁率 $f = 298.257223563$

參考橢球體
$ a: 長軸 $ $ b: 短軸 $ $ f: 扁率 = \frac{a-b}{a} $
座標格式
大地座標 經、緯度座標。以
度、分、秒表示。(僅能表示位置與方向,無法直接表示距離)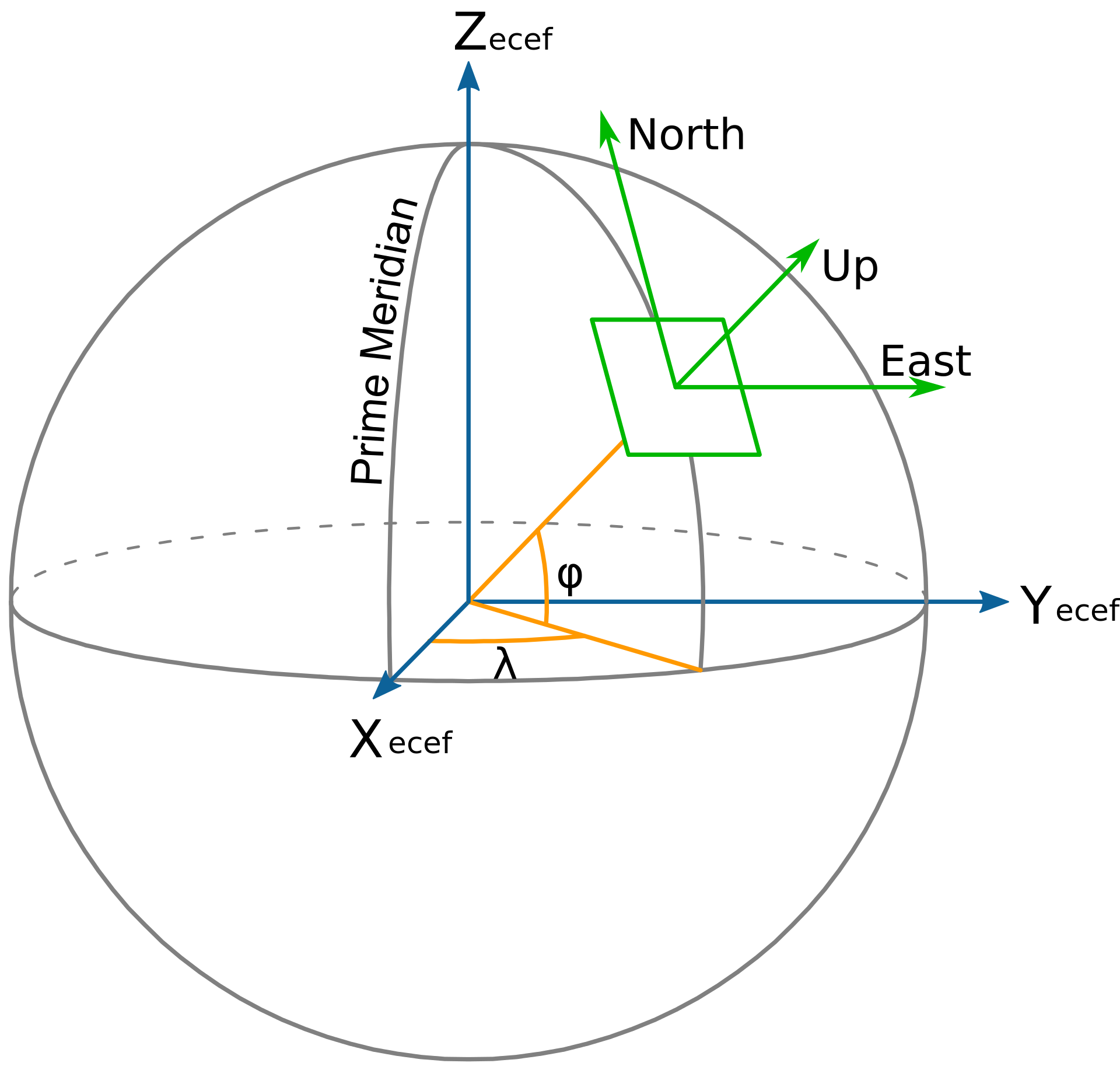
https://en.wikipedia.org/wiki/Local_tangent_plane_coordinates
平面座標 (可以表示距離與面績)
https://en.wikipedia.org/wiki/Universal_Transverse_Mercator_coordinate_system
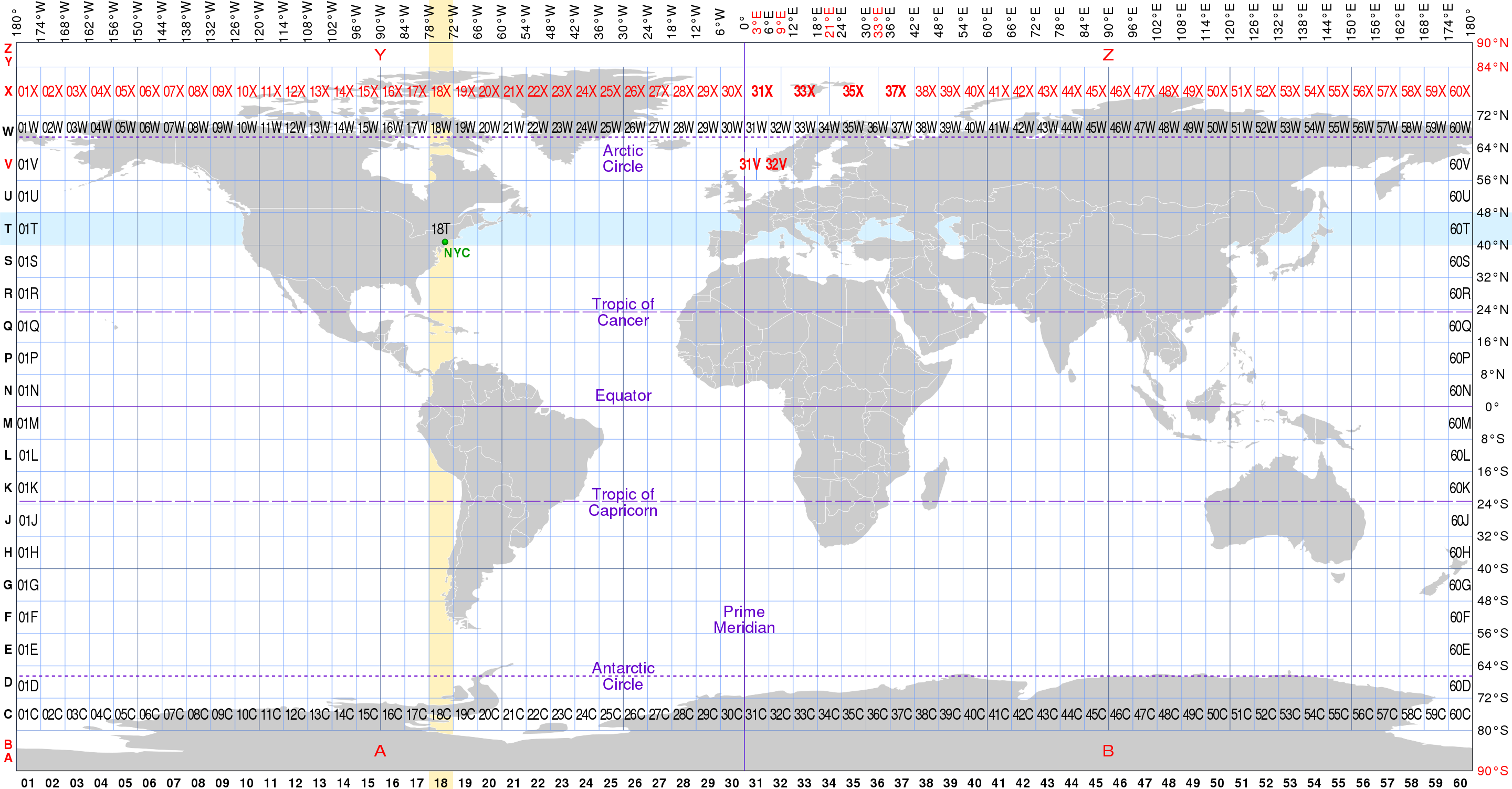
六度分帶 ( Universal Transverse Mercator, UTM)
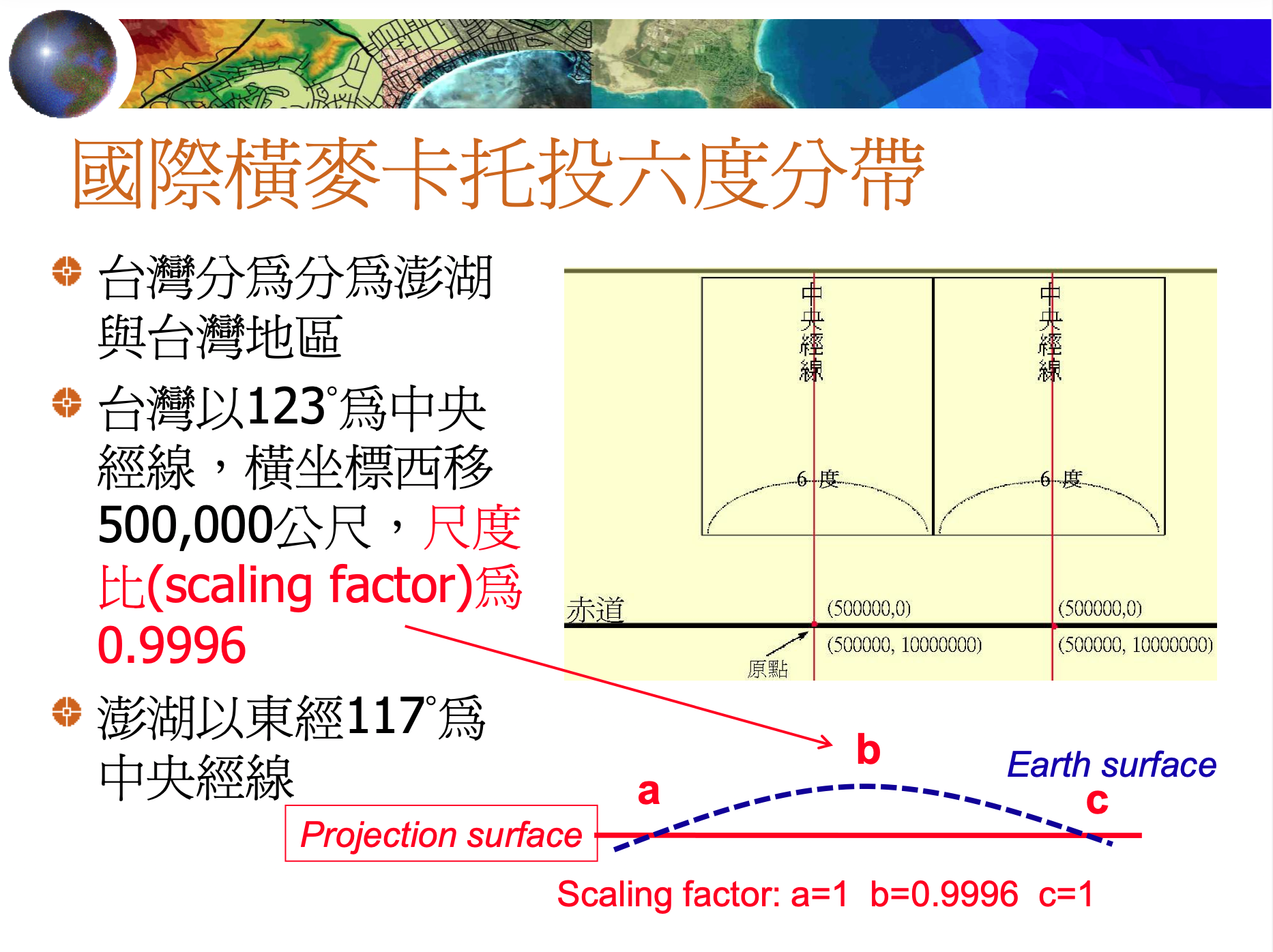
橫麥卡托六度分帶
二度分帶 (TM2)
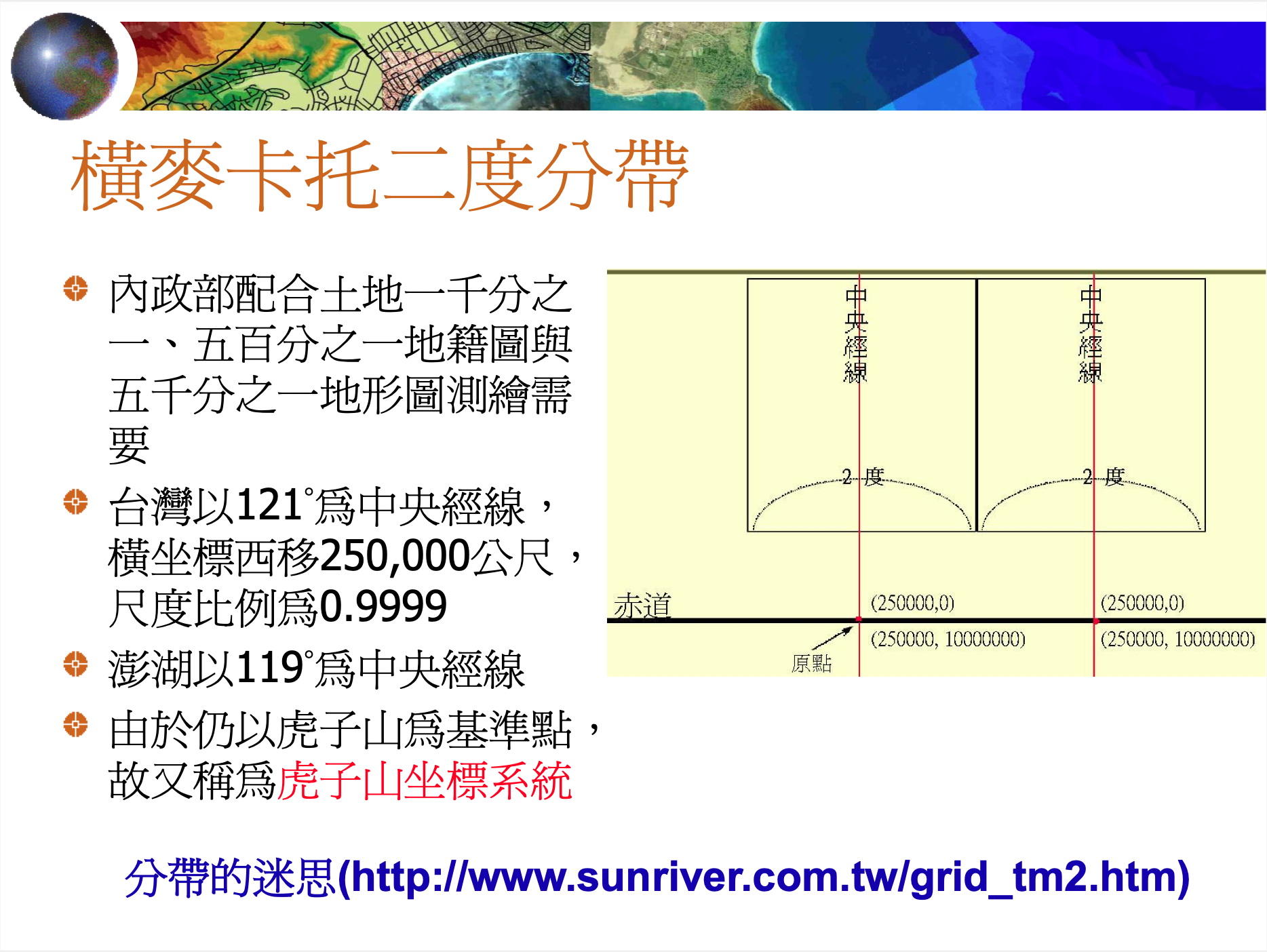
橫麥卡托二度分帶
座標轉換
TWD97 轉 TWD67 (平面四參數轉換:僅適用台灣本島,最大誤差約2公尺)
$X_{67} =X_{97} - 807.8 - AX_{97} - BY_{97}$ $Y_{67} = Y_{97} + 248.6 - AY_{97} - BX_{97}$ $A = 0.00001549$ $B = 0.000006521$
TWD67 轉 TWD97 (平面四參數轉換:僅適用台灣本島,最大誤差約2公尺)
$X_{97} = X_{67} + 807.8 + AX_{67} + BY_{67}$ $Y_{97} =Y_{67} - 248.6 + AY_{67} + BX_{67}$ $A = 0.00001549$ $B = 0.000006521$
實作
1package main
2
3import (
4 "fmt"
5 "math"
6)
7
8const (
9 a float64 = 6378137.0
10 b float64 = 6356752.3142451
11 lon0 float64 = 121 * math.Pi / 180
12 k0 float64 = 0.9999
13 dx float64 = 250000
14 dy float64 = 0
15)
16
17var (
18 e float64 = 1 - math.Pow(b, 2)/math.Pow(a, 2)
19 e2 float64 = (1 - math.Pow(b, 2)/math.Pow(a, 2)) / (math.Pow(b, 2) / math.Pow(a, 2))
20)
21
22func LonLat2TM2(lon, lat float64) (x, y float64) {
23
24 lon = (lon - math.Floor((lon+180)/360)*360) * math.Pi / 180
25 lat = lat * math.Pi / 180
26
27 V := a / math.Sqrt(1-e*math.Pow(math.Sin(lat), 2))
28 T := math.Pow(math.Tan(lat), 2)
29 C := e2 * math.Pow(math.Cos(lat), 2)
30 A := math.Cos(lat) * (lon - lon0)
31 M := a * ((1.0-e/4.0-3.0*math.Pow(e, 2)/64.0-5.0*math.Pow(e, 3)/256.0)*lat -
32 (3.0*e/8.0+3.0*math.Pow(e, 2)/32.0+45.0*math.Pow(e, 3)/1024.0)*
33 math.Sin(2.0*lat) + (15.0*math.Pow(e, 2)/256.0+45.0*math.Pow(e, 3)/1024.0)*
34 math.Sin(4.0*lat) - (35.0*math.Pow(e, 3)/3072.0)*math.Sin(6.0*lat))
35
36 x = dx +
37 k0*V*(A+(1-T+C)*math.Pow(A, 3)/6+
38 (5-18*T+math.Pow(T, 2)+72*C-58*e2)*math.Pow(A, 5)/120)
39
40 y = dy +
41 k0*(M+V*math.Tan(lat)*(math.Pow(A, 2)/2+(5-T+9*C+4*math.Pow(C, 2))*math.Pow(A, 4)/24+
42 (61-58*T+math.Pow(T, 2)+600*C-330*e2)*math.Pow(A, 6)/720))
43 return
44}
45
46func TM22LonLat(x, y float64) (lon, lat float64) {
47 x -= dx
48 y -= dy
49
50 // Calculate the Meridional Arc
51 M := y / k0
52
53 // Calculate Footprint Latitude
54 mu := M / (a * (1.0 - e/4.0 - 3*math.Pow(e, 2)/64.0 - 5*math.Pow(e, 3)/256.0))
55
56 e1 := (1.0 - math.Sqrt(1.0-e)) / (1.0 + math.Sqrt(1.0-e))
57
58 J1 := (3*e1/2 - 27*math.Pow(e1, 3)/32.0)
59 J2 := (21*math.Pow(e1, 2)/16 - 55*math.Pow(e1, 4)/32.0)
60 J3 := (151 * math.Pow(e1, 3) / 96.0)
61 J4 := (1097 * math.Pow(e1, 4) / 512.0)
62
63 fp := mu + J1*math.Sin(2*mu) + J2*math.Sin(4*mu) + J3*math.Sin(6*mu) + J4*math.Sin(8*mu)
64
65 // Calculate Latitude and Longitude
66
67 C1 := e2 * math.Pow(math.Cos(fp), 2)
68 T1 := math.Pow(math.Tan(fp), 2)
69 R1 := a * (1 - e) / math.Pow((1-e*math.Pow(math.Sin(fp), 2)), (3.0/2.0))
70 N1 := a / math.Pow((1-e*math.Pow(math.Sin(fp), 2)), 0.5)
71
72 D := x / (N1 * k0)
73
74 // 計算緯度
75 Q1 := N1 * math.Tan(fp) / R1
76 Q2 := (math.Pow(D, 2) / 2.0)
77 Q3 := (5 + 3*T1 + 10*C1 - 4*math.Pow(C1, 2) - 9*e2) * math.Pow(D, 4) / 24.0
78 Q4 := (61 + 90*T1 + 298*C1 + 45*math.Pow(T1, 2) - 3*math.Pow(C1, 2) - 252*e2) *
79 math.Pow(D, 6) / 720.0
80 lat = fp - Q1*(Q2-Q3+Q4)
81
82 // 計算經度
83 Q5 := D
84 Q6 := (1 + 2*T1 + C1) * math.Pow(D, 3) / 6
85 Q7 := (5 - 2*C1 + 28*T1 - 3*math.Pow(C1, 2) + 8*e2 + 24*math.Pow(T1, 2)) *
86 math.Pow(D, 5) / 120.0
87 lon = lon0 + (Q5-Q6+Q7)/math.Cos(fp)
88
89 lat = (lat * 180) / math.Pi //緯
90 lon = (lon * 180) / math.Pi //經
91
92 return
93}
94
95func TWD672TWD97(x, y float64) (x_97, y_97 float64) {
96 const A float64 = 0.00001549
97 const B float64 = 0.000006521
98 x_97 = x + 807.8 + A*x + B*y
99 y_97 = y - 248.6 + A*y + B*x
100 return
101}
102
103func TWD972TWD67(x, y float64) (x_67, y_67 float64) {
104 const A float64 = 0.00001549
105 const B float64 = 0.000006521
106 x_67 = x - 807.8 - A*x - B*y
107 y_67 = y + 248.6 - A*y - B*x
108 return
109}
110
111// References:
112// https://www.sunriver.com.tw/taiwanmap/grid_tm2_convert.php
113func main() {
114 const x_67 float64 = 247342
115 const y_67 float64 = 2652336
116
117 x_97, y_97 := TWD672TWD97(x_67, y_67)
118
119 fmt.Printf("TWD67:\n")
120 fmt.Printf("\t%f, %f\n", x_67, y_67)
121 fmt.Printf("TWD97:\n")
122 fmt.Printf("\t%f, %f\n", x_97, y_97)
123
124 lon, lat := TM22LonLat(x_97, y_97)
125
126 fmt.Printf("LonLat:\n")
127 fmt.Printf("\t%f, %f\n", lon, lat)
128}
129
130/*
131
132Output:
133
134TWD67:
135 247342.000000, 2652336.000000
136TWD97:
137 248170.927211, 2652130.097602
138LonLat:
139 120.982026, 23.973876
140*/
小結
台灣使用的座標表示法,想不到裡面有這麼多歷史可以探究。筆者看完許多資料後,推薦有興趣的同學可以看一看 Taiwan datums ,裡面干貨滿滿 !! 另外,本最後的實作主要是參考 大胖子與小個子的部落格 的程式,並以 Go 改寫。 感謝前人的整理與貢獻!